| Os testes de controle remoto de robôs situados em terra incluirão um robô humanoide que será controlado por um exoesqueleto vestido por um astronauta. Redação do Site Inovação Tecnológica - 01/07/2011  Além de contar com os melhores braços robóticos já construídos, o Justin agora também tem rodas.[Imagem: DLR] A Agência Espacial Europeia (ESA) apresentou uma série de robôs que farão parte de um teste de controle remoto com vistas a futuras explorações no espaço. Os robôs serão controlados a partir do laboratório Columbus, da Estação Espacial Internacional. Rede robótica O programa foi batizado de Meteron (Multi-purpose End-To-End Robotic Network Operations) - rede de operações robóticas ponto a ponto de múltiplos propósitos, em tradução livre. "A Estação Espacial é a plataforma orbital perfeita para simular cenários muito realísticos para a exploração humana", afirmou Kim Nergaard, coordenador do Meteron. Entre os robôs tele-operados estão o Justin e o jipe Eurobot, este sendo preparado para uma possível missão à Lua ou a Marte. Recentemente, o mesmo time participou de uma missão simulada a Marte, realizada no sul da Espanha. Esta, contudo, será a primeira vez que os robôs serão operados a partir da Estação Espacial. 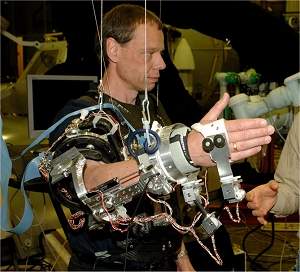 O astronauta Christer Fuglesang testa em Terra o exoesqueleto que está sendo desenvolvido para controlar remotamente robôs humanoides como o Justin. [Imagem: ESA-J. V. Haarlem] Controle por exoesqueleto Segundo a ESA, o projeto é que, em dois a três anos, o robô experimental Justin na Terra imite fielmente os movimentos de um astronauta na Estação Espacial. Isto será feito por meio de um exoesqueleto, que captará os movimentos do astronauta e os repassará ao robô. O objetivo primário desse teste é criar um substituto robótico para as caminhadas espaciais, permitindo que os astronautas fiquem em segurança no interior da Estação, guiando os robôs para que estes façam os trabalhos externos. No futuro, isto poderá ser feito com um robô na Lua ou em Marte, controlado a partir de uma nave em órbita, ou mesmo de um centro de controle na Terra. "Primeiro teremos que configurar uma arquitetura de comunicação robusta, estabelecer um sistema de operações e definir um protocolo para permitir que os astronautas, os robôs e nosso centro de controle da ESA trabalhem eficazmente em conjunto. Isto não é uma tarefa tão fácil quanto parece," disse Nergaard.  Além dos braços com múltiplos graus de movimento, o Justin tem mãos próprias para trabalhar com ferramentas desenvolvidas para humanos. [Imagem: DLR] Robô humanoide O robô Justin vem sendo aperfeiçoado ao longo dos anos, a partir de um trabalho realizado pela DLR, a agência espacial alemã. Tudo começou com os ainda insuperáveis braços robóticos LWR. Em uma segunda etapa, dois braços LWR foram unidos a um dorso, formando o Justin, até então um robô fixo, como o Robonauta, que já está na Estação Espacial, esperando uma folga dos astronautas para montá-lo e colocá-lo em operação. Agora o Justin foi dotado de rodas. Embora as próprias rodas ainda sejam inadequadas para andar nos terrenos empoeirados da Lua ou de Marte, o sistema de suspensão é extremamente flexível, ajustando-se para que o robô possa se inclinar e manter o equilíbrio enquanto faz força em alguma tarefa.  A versão em testes do Eurobot só tem dois braços, embora já esteja sendo testado um sistema com três braços. [Imagem: ESA] Eurobot Inicialmente, os astronautas da Estação Espacial vão operar um protótipo do Eurobot, usando um computador equipado com telas especiais e um joystick. Este protótipo é um jipe robótico com quatro rodas e dois braços - já está sendo testado um sistema de três braços para equipar uma futura versão. O Eurobot possui seu próprio sistema de navegação, além de câmeras e sensores que vêm sendo testados desde 2008 no centro espacial ESTEC, na Holanda. Na próxima fase, os engenheiros vão permitir que os astronautas controlem um robô com a sensação de força e "toque". Esse sistema de controle poderá ser conectado a robôs humanoides, como o Justin. |
segunda-feira, 11 de julho de 2011
Robos controlados
Assinar:
Postar comentários (Atom)
Nenhum comentário:
Postar um comentário